![]()
Blog
BLOG
2023.11.08
高速精密の旗手【パラレルリンクロボット】を使った冷凍食品自動化事例
これまで自動化技術は主に大規模な生産設備に限定されていました。しかし近年、ロボット技術の高性能化と小型化が進み、中小規模の生産ラインにも導入が進んでいます。
今回ご紹介する冷凍食品産業においても、自動化技術は既に業界の中で重要な役割を果たしています。
本記事では、パラレルリンクロボットを用いた「冷凍食品移載システム」の導入事例を通じて、自動化の参考にしていただければ幸いです。
パラレルリンクロボットの特徴
パラレルリンクロボットは高速かつ高精度な作業を得意とし、生産ライン上を高速で流れる製品の小さな差異を検出する作業や、小型製品の箱詰めなどの作業に適しています。
そのため、以下のような用途に特に適しています。
- 食品のパレット積みや整列
- ラベル貼り付け作業
- 軽量な部品のピックアップ作業

剛性と高い出力
パラレルリンクロボットは複数のリンクが並列に構成されており、そのため剛性が高く、高い出力で動かすことができます。
高速作動時にもリンク部分の変形が発生しにくく、高い精度を実現できます。
限られた作業範囲と可搬重量
一方で、パラレルリンクロボットは広範囲での作業は難しく、限られた範囲でしか移動できません。
可搬重量も一般的に1kgから10kg程度の範囲に制限されています。
より重い製品を扱う場合は、コスト面や設置面積を改めて検討し、パラレルリンクロボットではなく自動機を選択するケースもあるでしょう。
シンプルでメンテナンスが容易
パラレルリンクロボットの構成はシンプルで、共通の部品が多く使われています。
よってメンテナンスが容易で、交換用の在庫も抑えることができます。
(※メンテナンスを行う際には専門知識が必要です。)
パラレルリンクロボットは、これらの特徴から、生産ラインにおける高速かつ精密な作業に貢献し、効率的な自動化を実現します。しかし、スペックと作業工程とのマッチングを見極める必要があります。
導入事例: 冷凍食品移載システム
パラレルリンクロボットを活用した冷凍食品移載システムを紹介します。
このシステムの目的は、上流から流れてくる冷凍食品をロボットハンドで受け取り、同時に流れる紙のトレイに移載することです。
その結果、1名から2名の人手を削減し、生産ラインのタクトを約70個/分程度に向上させました。
このシステムには、ロボット、ハンド、冷凍食品搬送コンベア、フレーム/カバー、制御盤などが組み合わさっており、複数の納入実績があることから、その信頼性が確認されています。
自動化技術が冷凍食品産業においても大いに貢献し、今後の進化に期待がかかることが分かります。
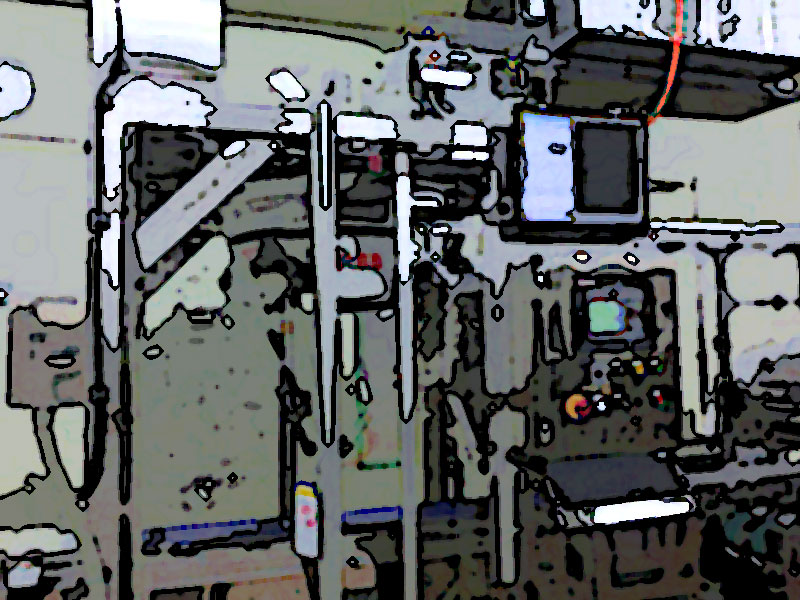
パラレルリンクロボットを使った冷凍食品移載システム
サンビットの取り組み
2009年、サンビットは食品関連のお客様から自動化の相談を受け、そのきっかけとなりロボットハンドの開発を始めました。
食品業界におけるロボット導入支援に積極的に取り組み、ロボットハンドの選定と製作、そしてロボットの稼働能力向上に向けたシステム構築のノウハウを蓄積してきました。
また、2014年にはロボットシステム設計開発専用工場を開設し、ロボットの研究と開発に専念しています。
工場の自動化、省力化をご検討の際には、弊社を含めてロボットSIerにご相談ください。
サンビットでは、製造業向けの産業用ロボットや自動機の導入支援を行っています。
ロボットの選定から最適なロボットシステムの設計・施工・保守・メンテナンスまで、ワンストップでサポートいたします。また、補助金制度の申請サポートも行っておりますので、中小企業でも安心して産業用ロボットを導入することができます。
私たちはお客様の成功を支えるために、導入後も評価と改善を継続的に行い、最適なソリューションを提供しています。
ご相談やご要望がありましたら、いつでもお気軽にお声掛けください。
私たちはお客様のビジネスに貢献し、共に成長していけるパートナーでありたいと考えています。
お問い合わせ
サンビット株式会社
担当:RM部 山野 銀哉
e-mail:g_yamano@sunbit.co.jp
最近のエントリー
AIエージェント元年、その現状と課題
2026.07.27
各社から相次いで登場している「AIエージェント」。情報収集や資料作成、業務ツールの操作まで任せられるようになった一方、現場では「思ったほど使えていない」という声も聞かれます。各社のAIエージェント機能を紹介するとともに、導入がうまくいかない5つの理由を整理。業務の棚卸しや手順の分解、品質基準の明文化など、小さく試しながら実用化を進める方法を解説しています。

QRコードを使ったフィッシング詐欺が急増【第16回 情報セキュリティブログ】
2026.07.24
QRコードを悪用したフィッシング詐欺「クイッシング」が増加しています。画像内のURLはメールフィルターで検知されにくく、スマートフォンを経由して偽サイトへ誘導される点が特徴です。セキュリティ意識が高い人ほど狙われる巧妙な手口と、被害を防ぐために実践したい3つの確認ポイントをご紹介します。
AIが変える仕事のカタチ ~ Blaze と SlackBot で実現する開発・業務の効率化 ~
2026.07.21
Salesforceの設定・開発を自然言語で支援するAIエージェント「Blaze」と、SlackBotを活用した業務自動化を紹介します。AIは、日々の細かな作業をどこまで効率化できるのでしょうか。設定変更やデータ確認、商談分析、活動登録漏れの検知・入力など、サンビットで実際に構築・運用している仕組みを交えながら、AIに任せる業務と、人がより力を注ぐべき仕事について紹介します。

おもちゃたちは、いつも必要とされなくなる不安と向き合っていた?|『トイ・ストーリー』シリーズを振り返って
2026.07.13
『トイ・ストーリー』シリーズを、「必要とされなくなる不安」という視点から振り返ります。ウッディたちが向き合ってきた居場所の変化、役割の終わり、そしてデジタル時代におけるおもちゃの存在意義を通じて、現代を生きる私たちの不安にも重なるテーマを考えます。

カテゴリーリスト
アーカイブ
- 2026年07月(5)
- 2026年06月(5)
- 2026年05月(5)
- 2026年04月(5)
- 2026年03月(6)
- 2026年02月(4)
- 2026年01月(5)
- 2025年12月(5)
- 2025年11月(7)
- 2025年10月(4)
- 2025年09月(8)
- 2025年08月(6)
- 2025年07月(7)
- 2025年06月(7)
- 2025年05月(7)
- 2025年04月(6)
- 2025年03月(8)
- 2025年02月(6)
- 2025年01月(6)
- 2024年12月(7)
- 2024年11月(7)
- 2024年10月(6)
- 2024年09月(8)
- 2024年08月(6)
- 2024年07月(8)
- 2024年06月(6)
- 2024年05月(7)
- 2024年04月(7)
- 2024年03月(7)
- 2024年02月(8)
- 2024年01月(8)
- 2023年12月(9)
- 2023年11月(9)
- 2023年10月(8)
- 2023年09月(7)
- 2023年08月(8)
- 2023年07月(9)
- 2023年06月(8)
- 2023年05月(7)
- 2023年04月(6)
- 2023年03月(6)
- 2023年02月(6)
- 2023年01月(6)
- 2022年12月(6)
- 2022年11月(6)
- 2022年10月(7)
- 2022年09月(6)
- 2022年08月(7)
- 2022年07月(6)
- 2022年06月(7)
- 2022年05月(7)
- 2022年04月(6)
- 2022年03月(6)
- 2022年02月(6)
- 2022年01月(7)
- 2021年12月(6)
- 2021年11月(7)
- 2021年10月(6)
- 2021年09月(6)
- 2021年08月(7)
- 2021年07月(6)
- 2021年06月(6)
- 2021年05月(7)
- 2021年04月(6)
- 2021年03月(7)
- 2021年02月(6)
- 2021年01月(6)
- 2020年12月(6)
- 2020年11月(6)
- 2020年10月(5)
- 2020年09月(4)
- 2020年08月(5)
- 2020年07月(5)
- 2020年06月(5)
- 2020年05月(4)
- 2020年04月(4)
- 2020年03月(6)
- 2020年02月(4)
- 2020年01月(4)
- 2019年12月(4)
- 2019年11月(4)
- 2019年10月(4)
- 2019年09月(5)
- 2019年08月(2)
- 2019年07月(5)
- 2019年06月(4)
- 2019年05月(3)
- 2019年04月(5)
- 2019年03月(4)
- 2019年02月(4)
- 2019年01月(4)
- 2018年12月(4)
- 2018年11月(4)
- 2018年10月(5)
- 2018年09月(4)
- 2018年08月(4)
- 2018年07月(5)
- 2018年06月(5)
- 2018年05月(4)
- 2018年04月(5)
- 2018年03月(5)
- 2018年02月(6)
- 2018年01月(5)
- 2017年12月(5)
- 2017年11月(4)
- 2017年10月(4)
- 2017年09月(2)
- 2017年08月(3)
- 2017年07月(1)
- 2017年05月(2)
- 2017年04月(5)
- 2017年03月(5)
ブログ内検索




検 索